Pet Feeder v1
Il faut bien nourrir le chat pendant les vacances, puisque nous ne pouvons pas toujours l’emmener avec nous.
On trouve toute sorte de montage sur internet, du broyeur de croquettes jusqu’au montage de « Doc » dans « retour vers le futur » !
J’ai commencé par faire un premier prototype, mais j’ai été confronté à un problème de taille, puisque la machine peut se bloquer, si une croquette se coince 🙁
Je suis donc revenu à un système comparable aux distributeurs de corne flakes, ou plus généralement de dry food. Pour faire simple, une roue avec des ailettes dans un tube, sous un entonoire, sous un grand tube.
La difficulté a été de trouver un équivalent à cette roue à ailettes, stratégique au montage. Finalement, j’ai pensé utiliser ca :  un goupillon pour nettoyer les bouteilles.
un goupillon pour nettoyer les bouteilles.
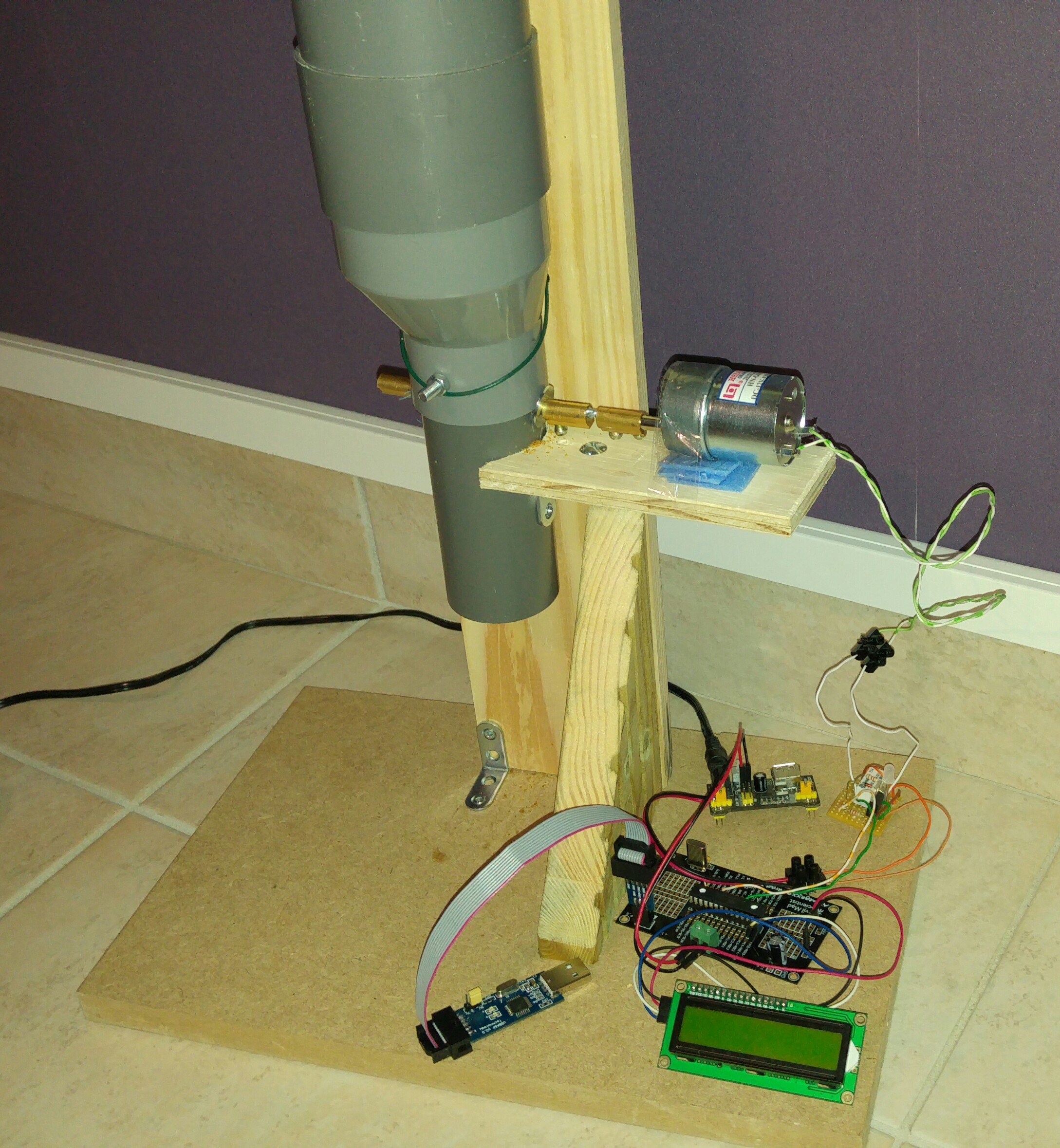
J’ai juste coupé aux bonnes dimensions, et utilisé un bout de domino électrique pour caler en translation, et solidariser avec le moteur.
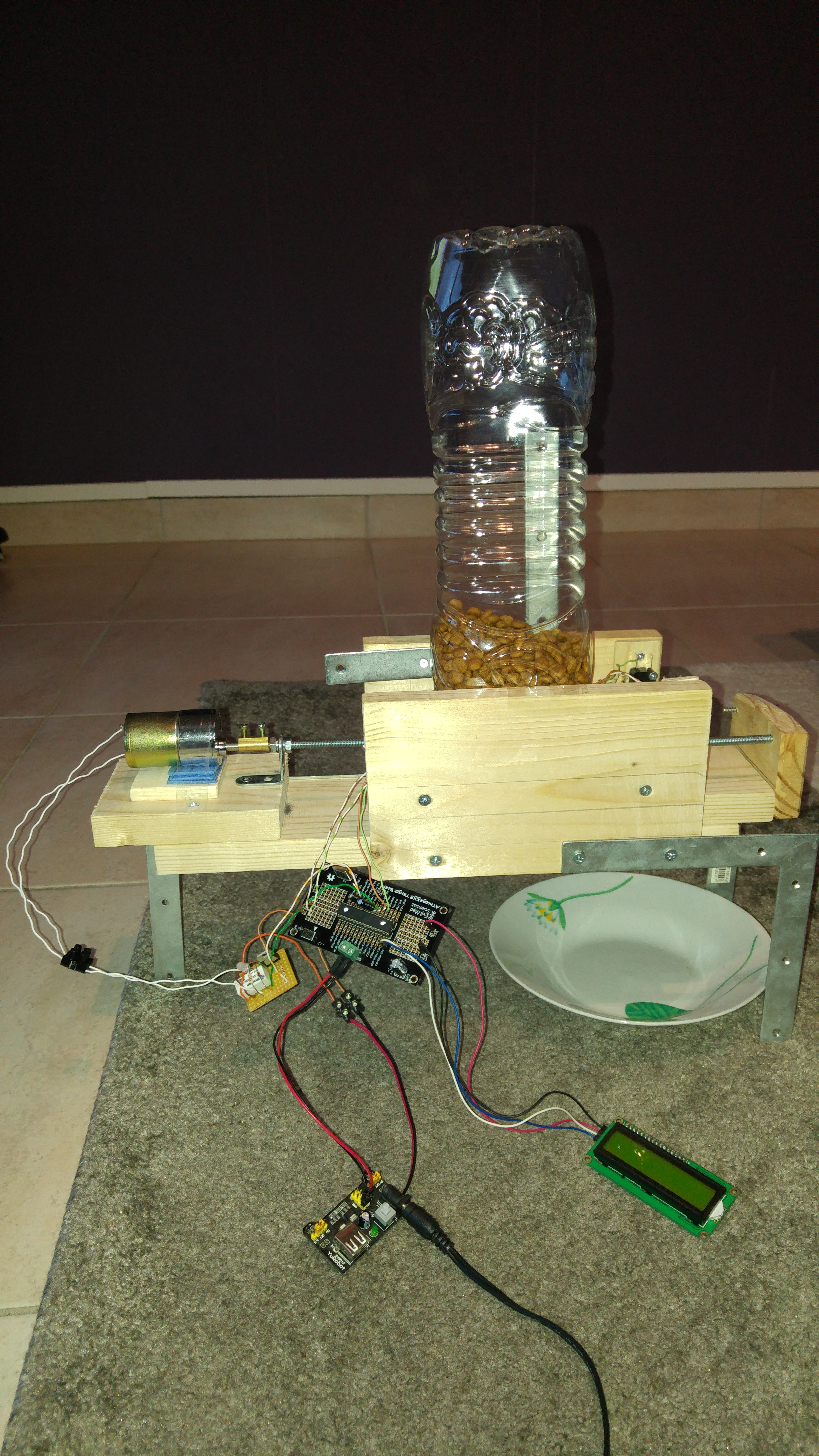
Ensuite, j’ai fixé une petite plateforme en bois pour poser le moteur, et ajouter quelques bouts de PVC et construit un support en bois :




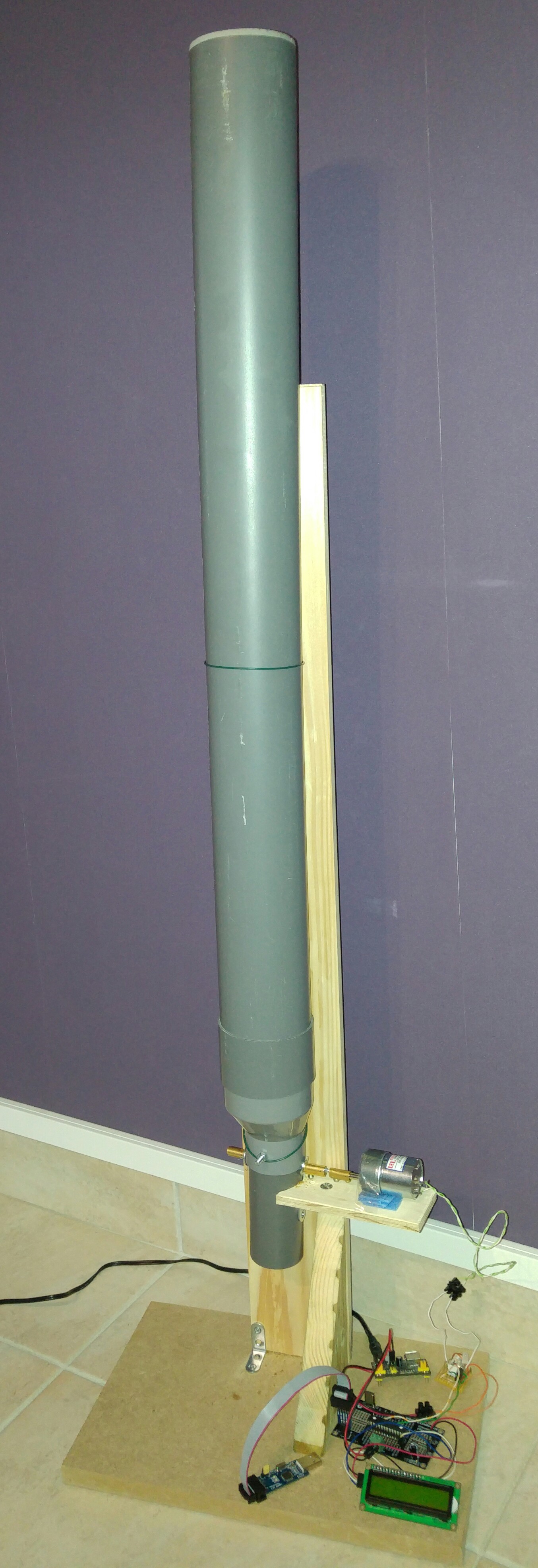
Au final, cela ressemble à ceci :
Maintenant, je m’attaque à la programmation.
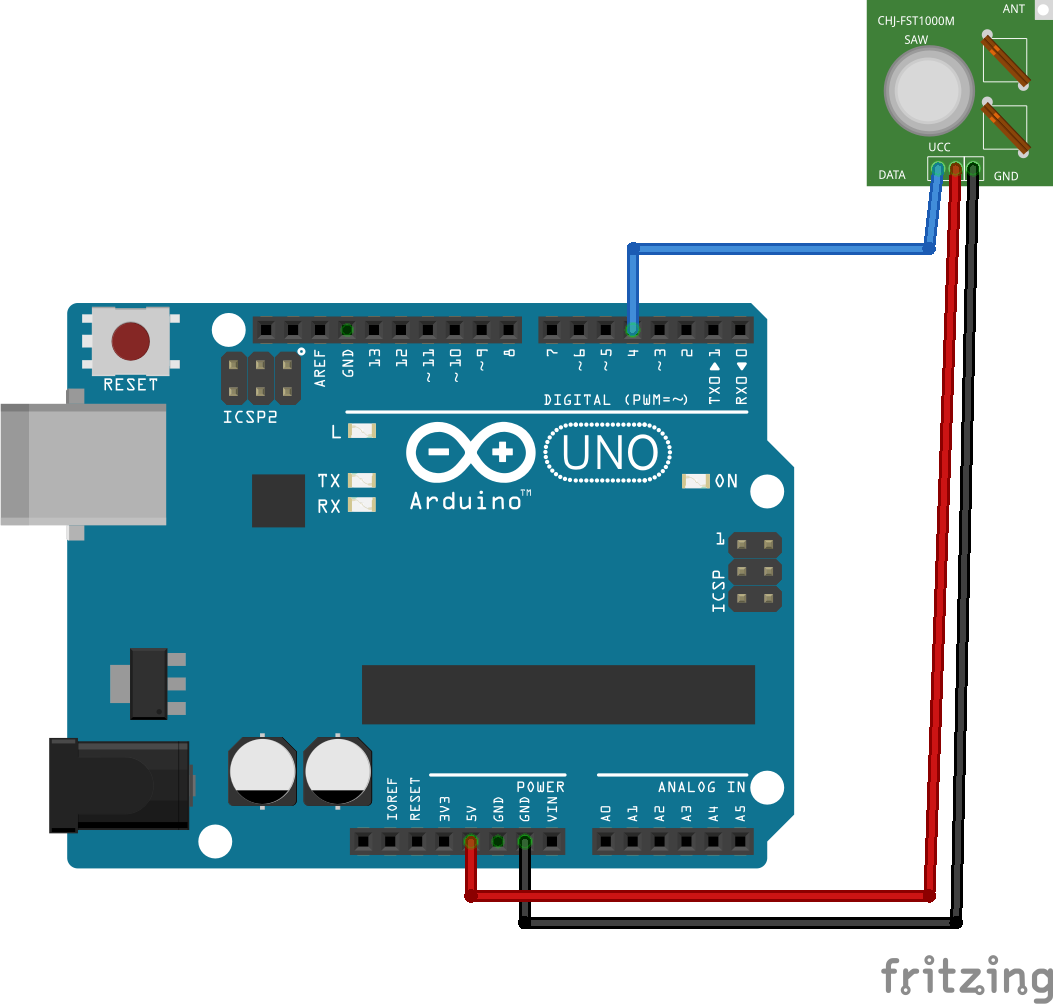
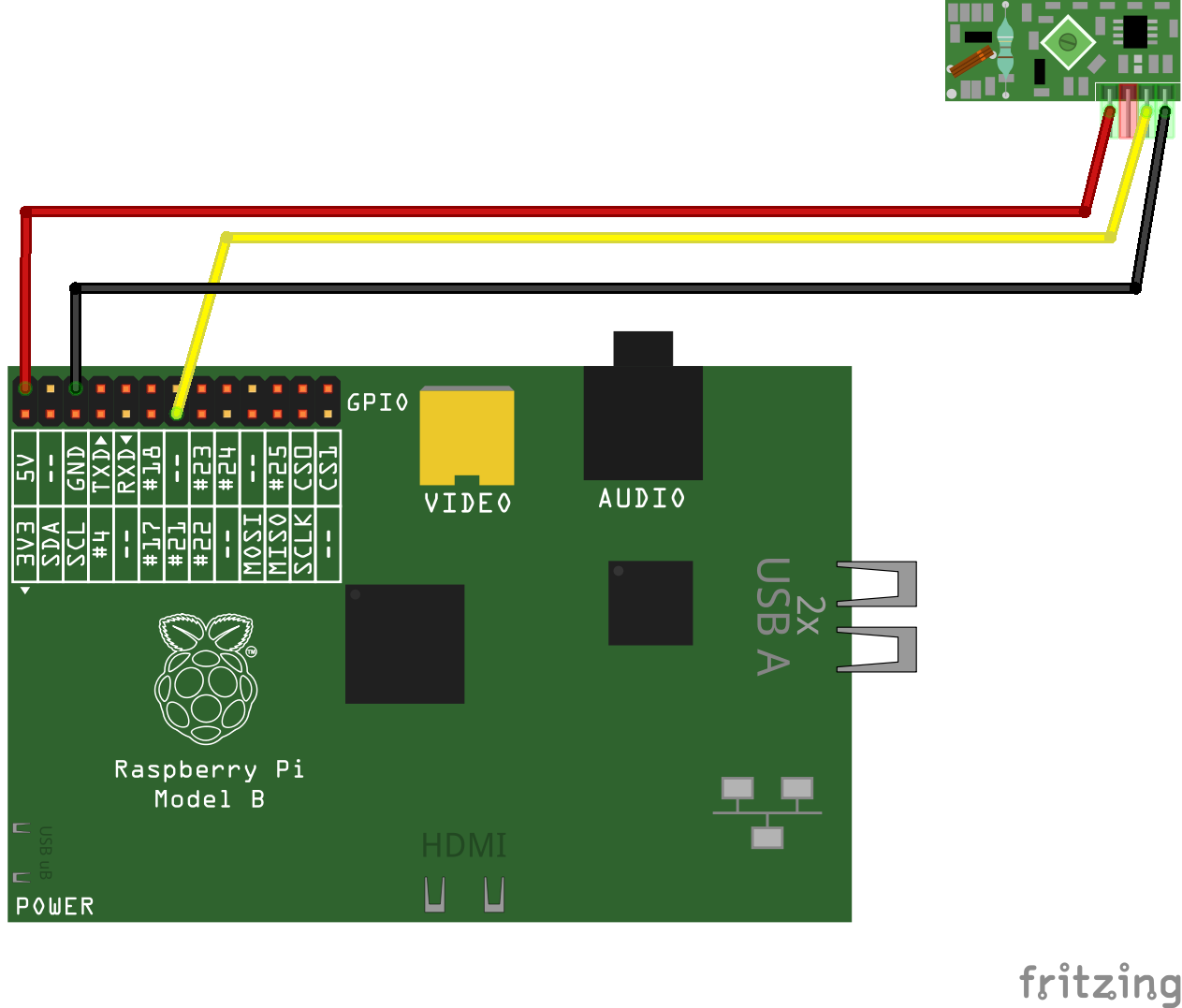
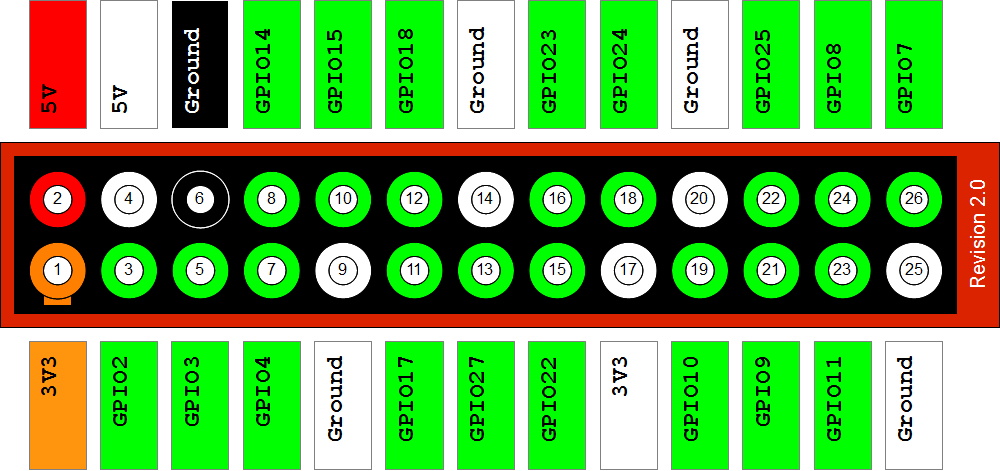
Je vais utiliser un AT-MEGA 328p (arduino UNO from scratch), un ESP8266, et quelques autres composants …
Update du 07/07/2016
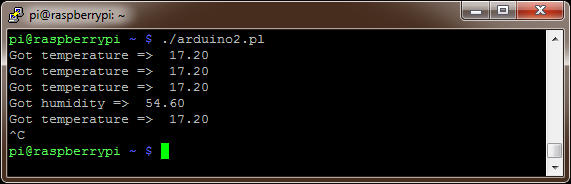
Apres une dizaine de jours d’utilisation, ce montage remplie sa fonction à merveille. Une dose est bien distribuée toutes les 12h environ. Plus exactement, toutes les 12h05 : il faudra améliorer la partie programmation horaire.
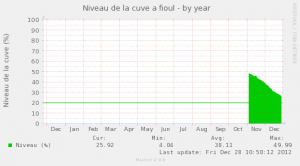
Le niveau de croquettes évolue selon les prévisions, assez régulièrement, même si le capteur n’a une précision qu’en centimètre. 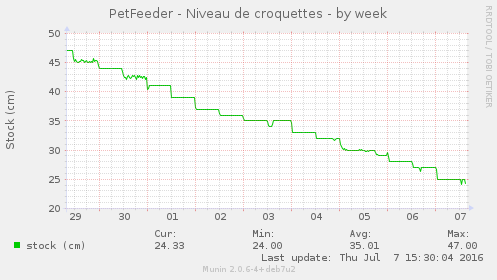
C’est aussi quelque chose à améliorer pour la prochaine version… si possible, approcher une précision de quelques millimètres.
Et puisqu’il est toujours préférable de vérifier qu’un bricolage fonctionne convenablement, voici le preuve en image (caméra IP en mode infra-rouge, donc en noir et blanc)
La chat a très vite repéré le bruit de ce drôle d’engin, et se précipite dessus.
Je peux l’affirmer grâce à une autre webcam, qui couvre son panier dans le garage, près de la chatière.